라이더의 4대 핵심기술 : 광원, 광검출, 빔조향, 측정
광원: 안정성 및 집적화/저가격 등을 위한 라이더 레이저 광원기술
라이더는 레이저와 같은 액티브 광원을 활용하여 빛의 반사방식으로 거리 등을 측정하는 원리를 가지고 있다.
이에 따라 레이저 광원은 250㎚~11㎛까지의 파장 영역 중 특정 파장을 가지거나 파장가변이 가능한 레이저 광원이 사용된다. 비과학 용도의 경우 500~1,000㎚의 파장을 갖는 레이저 광원을 활용하는 것이 일반적이며, 사람들의 눈을 보호하기 위하여 레이저의 최대출력을 제한하거나 특정 고도에서 레이저를 끄는 자동 차단장치를 활용하고 있다.
아울러 1,550㎚ 파장의 레이저는 눈에 강하게 흡수되지 않아 비교적 높은 출력 수준으로 활용되나, 검출기 기술이 이에 잘 대응되지 않아 낮은 정확도에도 불구하고 더 긴 범위를 커버하기 위해 사용된다.
특히, 항공/지형용 라이더는 1,064㎚ 파장의 YaG 레이저를 광원으로 활용하며, 수중용 라이더는 532㎚ 수준으로 물을 통과하기 위해 활용되어 다이오드 하이브 레이저를 광원으로 각각 활용하고 있다. 차량용 라이더의 경우 집적화 및 저가격 구현을 목적으로 실리콘 광검출기의 활용에 따라 850㎚ 및 905㎚ 파장 기반의 레이저 광원을 사용 중이다.
악천후 시 성능저하에 의한 오작동 발생에 따른 단점도 존재하지만 레이저가 퍼지지 않고 해상도와 정밀도가 높은 편이며 사물을 입체로 파악할 수 있다는 장점에 따라 널리 사용되고 있다.
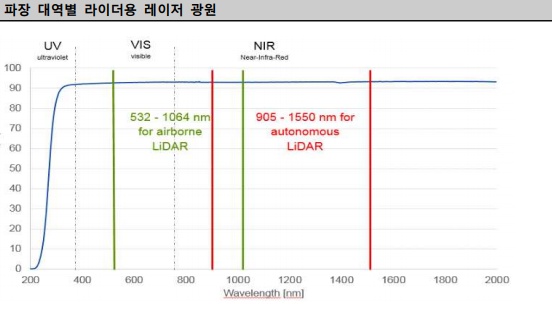
항공용은 주로 532~1,064㎚ 파장의 광원을 활용하여 라이더에 적용하고 있으며, 자동차용은 905~1,550㎚ 파장의 광원을 적용하고 있다.
자동차용의 경우 905㎚ 광원 및 1,550㎚ 광원 간의 장/단점이 뚜렷하여 인체에 대한 유해성 및 안전성 여부(시각안전), 라이더의 범위, 집적화(소형화), 저가격화, 해상도/정밀도 등 다양한 특성에 기인한 제품개발에 따라 광원의 종류/파장영역을 전략적으로 선택하고 있다.
광검출: 라이더를 구분하는 주요 요소인 광검출(스캐너) 기술
일반적으로 라이더의 기본 구성은 레이저 송신부, 레이저 검출부, 신호수집/처리와 데이터의 송수신부 등으로 구분된다. 레이저 검출부의 중요한 역할을 담당하는 광검출 기술은 영상에 대한 센서기술로 대변되고 있으며, 라이더를 구분하는 주요 요소(Factor)로도 볼 수 있다
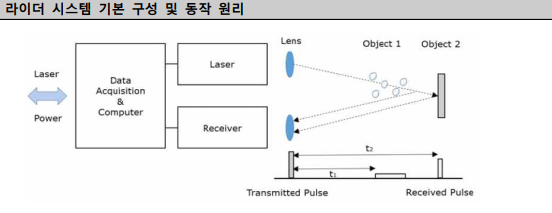
광검출과 관련하여 가장 기본적인 레이저 레인지파인더 기술은 1차원(1D) 스캐너 기술로서, 물체로부터 반사되는 레이저 빔의 수신시간을 측정하여 거리를 측정하는 가장 간단한 형태의 기술이다.
2D 레이저 스캐너 기술은 회전방식을 이용하여 레이저 빔의 진행방향을 포함, 특정 평면에서의 영상 정보를 수집하며, 단일 레이저, 단일 수신소자, 회전을 위한 모터 등으로 구성된다. 반면, 2D 레이저 스캐너를 차량에 탑재하고, 공간정보를 스캔한 후 컴퓨터를 통해 3D 영상을 구현할 수 있으나 실시간으로 3D 영상을 구현하기 위해서는 빠른 데이터의 수집이 요구된다.
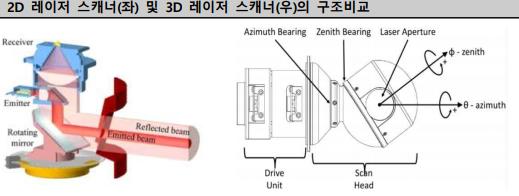
이를 위해 회전방식의 3D 스캐너 기술에서는 다수의 레이저 및 수신소자를 이용하여 특정 방향의 시야각(FOV, Field of View)에 대하여 동시 측정이 가능하도록 하고, 회전 스캐닝을 통해 구현한다.
또한, 넓은 시야각을 확보하기 위하여 많은 수의 레이저와 수신소자를 필요로 하며, 고난도의 패키징 기술을 요구하나 현재 상용화된 소자를 활용하여 구현할 수 있는 장점이 있다.
이에 따라 주요 선두업체 중 하나인 Velodyne Lidar Inc. 는 수신부를 2개로 나누어 각각 32개 채널의 수신소자를 포함시켜 0.4도의 수직해상도, 24.8도의 수직시야각, 360도 회전스캐닝을 통한 360도 수평시야각 등을 확보하고 있다.
빔조향: 고속동작 라이더를 위한 빔조향 메커니즘
빔조향 메커니즘(beam steering mechanism)은 광검출(스캐닝) 기술과도 연관성이 높다.
기존의 라이더가 기계식(회전식) 스캐닝은 송수신부가 360도 회전을 해야만 전 영역을 커버할 수 있었으며, 고정식 스캐닝은 레이저 및 광검출 소자를 고정시키고 거울 등을 회전시켜 시야각이나 해상도를 확보하였다.
이에 반하여 비기계식 스캐닝은 OPA(Optical Phased Array, 광위상배열) 방식으로 빛의 간섭원리를 이용하여 기계식으로 움직이는 부분이 없이 빛이 나아가는 방향을 전기적으로 조절하도록 한다. 이에 따라 빔조향은 OPA 방식에서 수십~수백 채널의 회절격자 배열로 레이저 빛이 방출되며, 격자 간 위상 차이에 따라 far-field의 특정 강도로 빔이 진행되고, 위상각도를 변화시켜 빔의 조향각을 제어하는 점에서 중요한 역할을 하고 있다.
따라서 최적의 OPA 구조를 갖추게 되면 고속동작이 가능한 라이더용 센서확보가 가능할 전망이다.
측정: 단가 및 성능 간의 밸런스가 중요한 거리측정 프로세스
레이저를 통한 거리측정 기술은 기본적으로 레이저를 발생시킨 후 목표물에서 되돌아오는 레이저의 파장을 측정하여 목표물까지의 거리를 원격으로 측정하는 기술이나, 군사용으로 사용되던 기술이 자동화 산업현장의 무인화 시스템, 선박의 접안 시 배의 파손을 막기 위한 거리측정, 무인 과속 감지기, 차량 충돌 방지시스템 등으로 다양하게 응용되고 있다.
군사용의 측정거리는 수 km에서 수십 km 수준이고, 측정오차가 5~10m 수준이었던 반면, 산업용은 측정거리를 1km 이내, 측정오차 1~10mm 이내를 만족하고 있다.
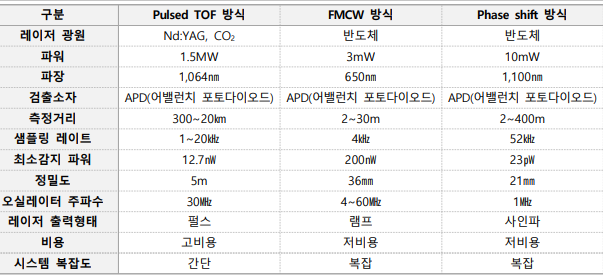
레이저를 이용한 거리측정 프로세스는 크게 펄스의 왕복시간을 측정하는 Pulsed TOF(Time Of Flight), 신호의 위상차를 통해 거리를 측정하는 위상변이(phase shift), 주파수에 변화를 준 후 주파수 차이를 통해 거리정보를 추출하는 주파수 변조법(FMCW, Frequency Modulated Conti-nuous Wave) 등이 있으며, 최근에 개발되고 있는 주파수 변조법의 발전 형태인 무작위 주파수 변조법(RMCW, Randomly Modulated Continuous Wave)도 있다.
무작위 주파수 변조법은 무작위로 변조된 연속파를 활용하여 다른 라이더나 기타 광원으로부터의 간섭을 차단하는 기술이다.
특히, Pulsed TOF 방식은 시간 펄스 폭이 매우 짧은 레이저 광을 표적으로 보낸 후, 표적 표면에서 반사되어 돌아오는 시간을 측정하고, 표적거리를 시간 값과 빛의 속도로부터 산출하는 원리이다.
FMCW 방식은 FMCW 레이더와 원리가 동일하며 표적의 거리정보는 비트 주파수에 포함되어 있어 레퍼런스 신호와 반사된 신호를 믹서의 입력 신호로 사용하여 비트 주파수 신호를 획득하고 푸리에 변환방식으로 비트 주파수를 얻게 된다. 이후 공식에 의해 표적까지의 거리를 측정할 수 있다.
Phase shift 방식은 상기 2개의 방식보다 거리측정 방법이 보다 정확할 수 있으며, 표적에서 반사되어 온 파형의 주파수 변화량으로부터 거리를 환산하는 방법이다. 이에 따라 Pulsed TOF 방식은 장거리 측정에 적합하고 성능이 상대적으로 우수한 반면 시스템의 크기가 크고, 비용이 높다는 것이 단점이다.
FMCW 방식, Phase shift 방식 등은 비용을 줄이기 위해 도입되고 있으며, 빠른 스캐닝(측정)이 가능한 반면 주파수의 비선형성에 의해 시스템의 성능이 제한되어 FMCW는 수 십미터 정도의 거리 측정이 가능한 것이 단점이다.
댓글